
(実証実験)シールとスキャナーを使った新プログラミング教材
■固い話 (苦笑)
学校法人金沢工業大学(国際高専)と 株式会社ウイル・コーポレーション、株式会社PFU による産学連携プロジェクトです。
国際高専の先生から提案された企画で、ウイル・コーポレーション製 魔法のシール「プログラミングシール」と PFU製 非接触スキャナー「ScanSnap SV600」を使って、
新しい小学生(低学年)向けプログラミング教材を開発しました。
9/30「いしかわ宇宙の学校」の会場(*1)で、その有効性と商品化の可能性を確認するための実証実験を行いました。
■コンセプト
小学校低学年向けにはアンプラグド教材(≒子どもたちに PC/タブレットを使用させない教材)が望ましいと言われています。
しかし、そんなアンプラグド教材は、容易で展開に乏しく飽きやすいという側面もあります。
本新プログラミング教材は、「プログラミングシールを貼る」というアンプラグド教材を使います。
その貼ったシールを ある過程を経ると ロボットカーにプログラムが転送され、ロボットカーが指示通りに動くのです。
自分の指示通りに実車(ロボットカー)が動くことで、アンプラグド教材にありがちな飽きやすさが抑制されることが期待されます。
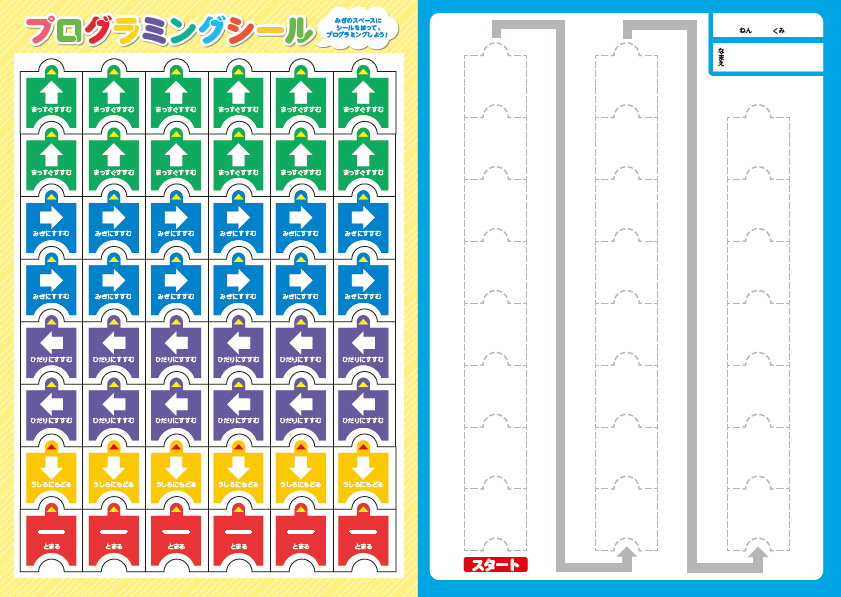
■プログラミングシール
ウイル・コーポレーション製 魔法のシール「プログラミングシール」は、何度でも貼ったり剥がしたりできるシールです。
「まえにすすむ」「みぎにすすむ」「ひだりへすすむ」「うしろにもどる」「とまる」という動作が表示されています。
このシールをシート上へ順番に貼ることで、ロボットカーを目的地まで走らす指示を作るのです。
|

|
|
■シールをスキャナーで取り込むと…
子どもたちが各自が貼った プログラムシールを、先生の机(PC)に持っていき PFU製 非接触スキャナー「ScanSnap SV600」(*2) で取り込み 画像データ(JPG)にします。
この画像は、子どもたちが貼ったシール群ですから、連続した動きが表現されています。
そして 先生のPC上で プログラム変換ツールの[転送]ボタンを押すと、画像が ロボットカーを動かすプログラム(コード)に変換されます。
|

|

|

|
■ロボットカー
スキャナを使って、動きを表現したシールが プログラム(コード)に変換されていますので、そのプログラムをロボットカーに転送すれば指示通りに動く訳です。
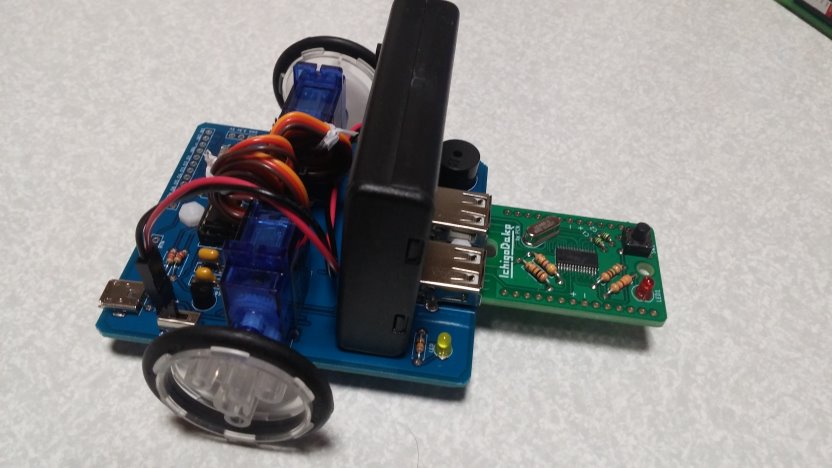
今回のロボットカーは、実証実験用に製作した 試作品です。
ちょっと訳あって、IchigoJam を使用したロボットカー、の開発としました。
ということは、スキャナーで取り込んだシールの画像から変換されたプログラム(コード)とは、IchigoJam BASIC なのです。
ただし、子どもたちからは プログラム(コード)は一切見えません。
IchigoJamの新型「IchigoDake」という抜き差し容易なミニコンピュータ基板を使用しました。
スキャナーから変換されたプログラムが IchigoDakeに書きこまれ、それを ロボットカーに挿せば プログラムが動きロボットカーが動くのです。
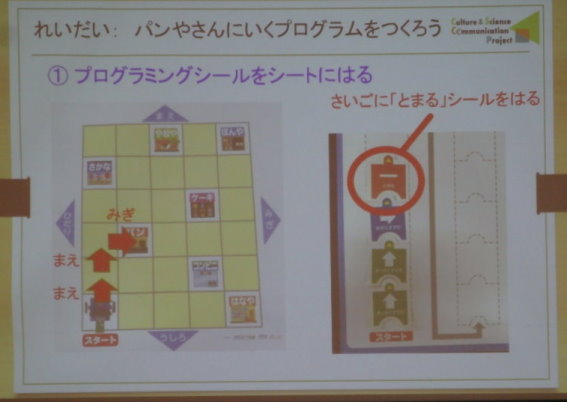
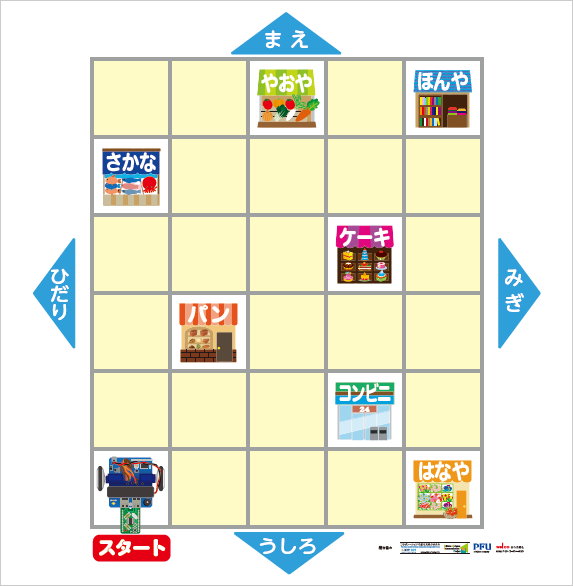
■走らすコース
スタート位置から見て、前/右/左/後へ進む と方向軸固定です。
これをドラクエマップ方式とでも呼びましょうか。
車を運転する大人なら「直進,右折,直進,左折」と考えるところですが、子どもたちには「まえ,みぎ,みぎ,まえ」とシールを貼ってもらいます。
2コースを用意。
まずは、お店周りコース。
「スタートからケーキ屋に行こう」の最初のミッションはすぐにクリアする。
次は自分で考えた目的地「本屋へ行ってから花屋へ行こう」「わざと遠回りして八百屋へ行く」と子どもたちが 自由に目的地を決めて動かしだします。
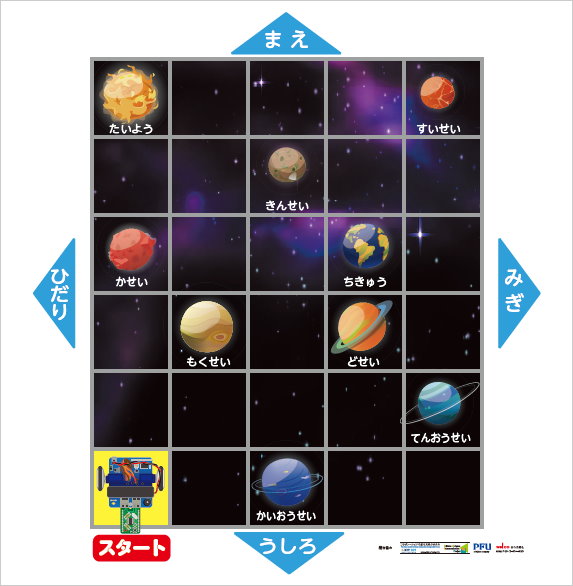
皆が一通りの動きを作ったあとに
「地球を目指せ」のコースに変更。
「僕は土星に行きたい」「全ての星を通って太陽を目指す」ここでも子どもたちが自由に目的地を決めて動かしだします。
同席した保護者さんからの声で「 [通行止め] などのコースの制限をかけると深く考えるようになると思う」とあり、いいアイデア頂きました。
|
|
■実証実験の様子から
先に言うと、(細かい指摘反映事項はあるけど) 大成功でした。
予想以上に好印象、有効でした。
子どもたちが「まえ、まえ、みぎ、みぎ、まえ、~」と自ら考えてから シールを貼っていました。
そのシールで ロボットカーを動かしてみて、「まえ、が1個多かった~」とか どこが間違えていたか? シールを見直して検証してくれます。
目的地まで成功した子は、次の目的地を自分で決めて動かしはじめます。
シートいっぱいにシールを貼りだします。
こういう自分でゴールを決めて、動きを考えて、指示通りにゴールに到達した達成感で子どもたちは大喜びでした。

また、ここで1つ、運営面からも大きな効果が確認できました。
子ども1人1人に渡すのはシール。これは 例)100円/枚のように安価な消耗品的なもの。
スキャナは教室に1台、ロボットカーは 数人の班に1台、でOK。
つまり、教材準備コストが大幅に削減できます。
このシールで思考、ロボットカーで動作確認、というのは 大きな利点になります。
アンプラグド・ロボット教材にありがちな、ロボットを誰か1人で1台独占して動きをトライ&エラーを繰り返し続ける、という行為が、本シールプログラミングには見られません。
別の言いかたでは「いきあたりばったり的に(ロボットを)動かしてみるを繰り返す」が見られません。
本教材の場合は、1人1人に配られたシールを貼る/剥がすという行為が 思考だからですね。
もし間違えた場合は、シールを貼り直さないと試せず、使っていたロボットカーを次の子に渡すことになる訳です。
別の観点では、スキャナという装置/仕組みに興味津々でした。
シールをスキャンすると画像になって、それが自動的にプログラムになって、ロボットに送られると動きだす。
この一連のテクノロジーが不思議そうでした。
■今後
この新教材、低学年向けに有効!、と判断します。
では、次のステップ。
・どんなロボットカーを使うか?(今回の試作品の改良で良いのか?)
・教材一式のパッケージとして商品化するのか?
・消耗品なシールは1枚いくらになるか?
・ :
関係者で検討していきます。
乞うご期待!
参考
*1 : 宇宙の学校には、参加する小学生とその保護者、また スタッフとして参加される教職関係者(理科部会の先生他)からの 意見および評価をいただき、教材の有効性について検証します。
*2 : PFU製 非接触スキャナー「ScanSnap SV600」 http://scansnap.fujitsu.com/jp/product/sv600/
プレスリリース
http://www.pfu.fujitsu.com/news/2018/new180926.html
https://kyodonewsprwire.jp/release/201809268408
≪(参考)試作車について≫
本教材のコンセプト検証が目的でしたので、車は試作品です。
本プログラミング教材のコンセプトは
1) スキャナーで シールを読み取り、車の動きを表す内部データに変換
2) その動きを プログラム(コード)に変換
3) ロボットカーにプログラムを転送
4) ロボットカーがシールの指示通りに前/右/左/後に動く
上記の構成になります。
この 4)のロボットカーは、どんな今回 試作開発した車に限らず、他のロボットカーでもいいと思っています。
どの車を採用するか?一般商品化されるのか?まだ決まっていません。
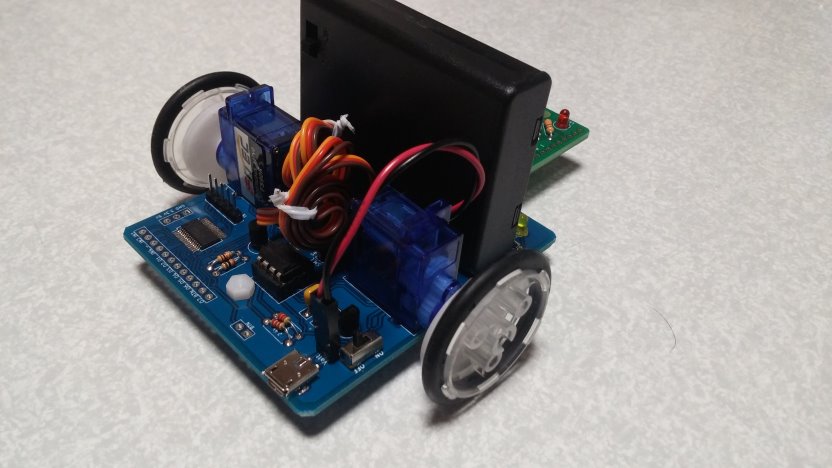
今回の試作車は、PFU社員であり PCN金沢を努める私が 設計/開発しました。
・車はローテーションサーボ(FS90R)の2輪、前後にキャスターピン代わりのネジ。
・IchigoDakeのPWM命令で左右のサーボモータを回して走らせます。
・車のボディーと IchigoDakeを挿すベース基板(DakeJacket相当)を 1枚のプリント基板で実装。
・電力は単4乾電池x4本で動かす予定でしたが、実証実験の場ではモバイルバッテリーで作動。
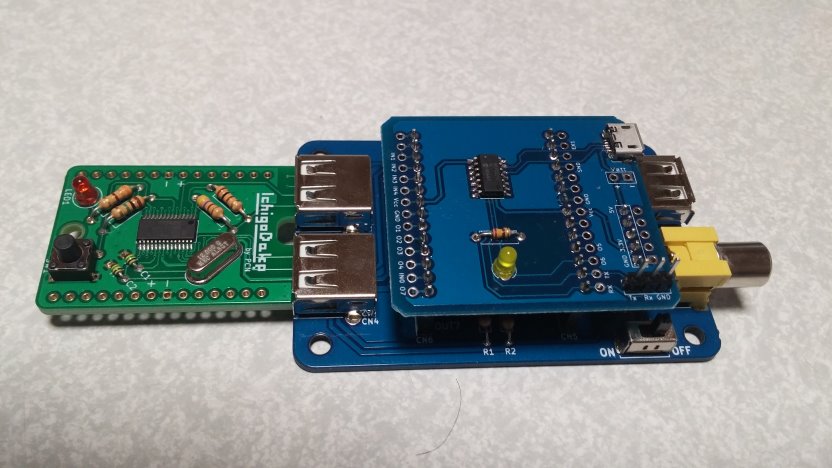
3)のプログラム転送機も 私が設計/開発しました。
というか、1),2)も 私と PFU社員の仲間による開発です。

|
|
|
|
